Projects
On this page you can find brief descriptions of various research projects I’ve worked on. For more detailed information, please go see my publications.
Research
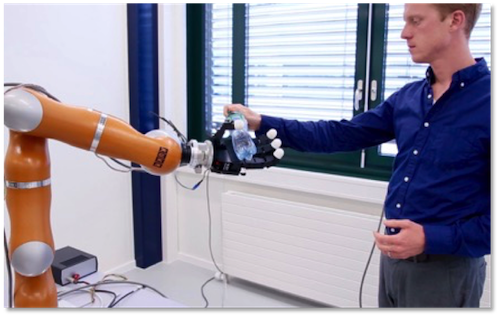
Human-Robot Handovers
We developed a human-inspired controller that could perform fast and fluent handovers (bi-directionally) between a human and robot team.
Understanding Natural Language Directions
We addressed the problem of a robot following directions through a completely unknown environment (i.e. without any prior map) and developed an approached based on imitation learning.
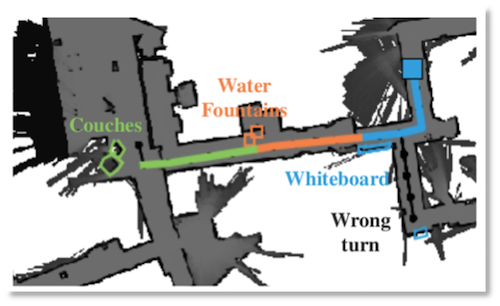
Generating Maps from Language
Extending the work on following direction, we investigated how robots could use language as a sensor, whereby the robot could extend the partial map it has (built using its sensors) with information that was contained in the direction.
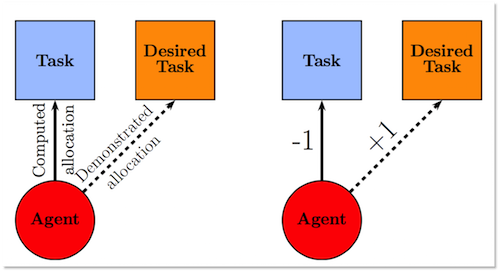
Imitation Learning for Multi-Robot Coordination
We looked at how a team of robots could learn to allocate tasks using expert demonstrations, by learning the task allocation utility function.